Shared memory buffer.
Producer writes next object to In. Then advances In 1 step rightwards.
Consumer reads next object from Out.
Then advances Out 1 step rightwards.
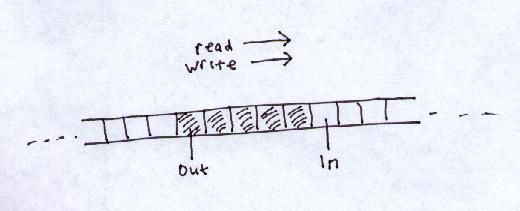
Need infinite buffer.
Producer:
repeat
produce item in temporary variable
while ( ( In + 1 ) mod n = Out )
no-op
buffer[In] = the new item
In := ( In + 1 ) mod n
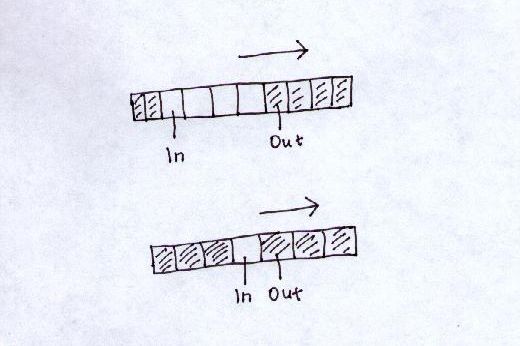
Would go on forever advancing rightwards
if not for addition of the "mod n".
With this code actually can only ever have n-1 items.
Consumer:
repeat
while ( In = Out )
no-op
read buffer[Out] into temporary variable
Out := ( Out + 1 ) mod n
consume the new item
Some people are unsure what mod is:
0 mod 16 = 0 1 mod 16 = 1 .. 15 mod 16 = 15 16 mod 16 = 0 17 mod 16 = 1 18 mod 16 = 2 .. 31 mod 16 = 15 32 mod 16 = 0 ...
This Producer-Consumer problem is actually "pipe" | in UNIX. Each can work at different speeds.
sort is a bad example. Why?
grep is a better example of working in parallel at different speeds:prog | sort
grep doesn't have to wait until prog terminates. It can get to work filtering partial output.prog | grep "string"
Producer waits - buffer full.
Producer may do lots of calculation, then produce 1 line of output, lots more calculation (this is not a CPU burst - calculation may involve background I/O, e.g. file I/O), then 1 more line of output, and so on. Producer may produce at different speeds depending on what it is producing. May take more time to construct some outputs than others. Also, may take more time to consume some than others. Consumer may consume at different speeds throughout, sometimes fast, sometimes slow.
Note: Pipe in UNIX is technically a file with no name. In UNIX, we cache file data in memory (see later), and pipe is small file (e.g. 4 K), so typically the entire read-write buffer is actually in memory (i.e. it is actually shared memory).
Producer:
(write item) counter++;Consumer:
(read item) counter--;Surely we can run these in any order and it will work, and counter will stay up to date?
Not necessarily - it depends when the interrupts arrive.
The problem is that the HLL are not atomic (indivisible) instructions. The above HLL translates to Assembly like the following. Let's say the variable "counter" is stored at memory location 100. Then the Producer implements:
(write item) MOV AX, [100] ; read memory INC AX MOV [100], AX ; write memoryConsumer:
(read item) MOV BX, [100] DEC BX MOV [100], BX(It might also be AX, but we can regard it as using a different register because the context switch saves/restores registers).
Now, consider this pattern of interrupts. Say counter=5 beforehand. After running one produce and one consume in any order, counter should still be 5:
MOV AX, [100] ; AX=5 INC AX ; AX=6 (interrupt) MOV BX, [100] ; BX=5 DEC BX ; BX=4 (interrupt) MOV [100], AX ; counter=6 (interrupt) MOV [100], BX ; counter=4Counter=4!
A program, by definition, will consist of a pattern of alternating:
code that accesses shared data code that doesn't shared non-shared shared non-shared ...Call code that accesses shared data a critical section. Then can view every process as having structure:
repeat
{
critical section
remainder section
}
Of course, the program has to help us out.
Each program looks like:
repeat
{
code to mark entry to critical section ("entry section")
critical section
code to mark exit from critical section ("exit section")
remainder section
}
When in critical section, no other process in my group of co-operating processes is allowed interrupt.
Question - why not simply no interrupts?
Answer - OS still has to be able to interrupt.
Also, other processes (not involved with this memory space) can interrupt at will. Normal CPU scheduling still goes on. You can't hog the CPU just because you've written 2 co-operating processes.
And in fact, other processes in my group can interrupt (normal CPU scheduling) if they are in their remainder section.
Problem with any solution for n processes:
What if many processes are waiting to go into critical?
Who goes first?
After a go, do you go back to end of queue?
But what if you're ready again before processes
ahead of you in the queue are ready?
Criteria we want:
More shared data: turn = i - it's Process i's turn.
Process P0:
repeat
wait until turn=0
Critical section
turn=1
Remainder section
Process P1:
repeat
wait until turn=1
Critical section
turn=0
Remainder section
Mutual exclusion ok.Progress not good - each has to wait 1 go. P0 gone into its (long) remainder, P1 executes critical and finishes its (short) remainder long before P0, but still has to wait for P0 to finish and do critical before it can again. Strict alternation not necessarily good - Buffer is actually pointless, since never used! Only ever use 1 space of it.
If P1 terminates, can P0 still finish? - Use strategy of "Giving up your go" before remainder rather than claiming your go. exit() is in remainder section.
What if exit() is in critical section? - It can't be, by definition.
New data: flag[i] = true - Process i is ready to go into critical.
Process P0:
repeat
flag[0] := true
while flag[1] do no-op
Critical section
flag[0] := false
Remainder section
Process P1:
repeat
flag[1] := true
while flag[0] do no-op
Critical section
flag[1] := false
Remainder section
Doesn't work at all.
Both flags set to true at start.
"After you." "No, after you." "I insist." etc.
Separation of flag and turn.
flag says I'm ready, turn says "whose turn it is".
One of these turns will last.
Process Pi, where j refers to "the other process":
repeat
{
flag[i] := true
turn := j
while ( flag[j] and turn=j ) do no-op
critical
flag[i] := false
remainder
}
"flag" maintains a truth about the world - that I am at start/end of critical. "turn" is not actually whose turn it is. It is just a variable for solving conflict if two processes are ready to go into critical. They all give up their turns so that one will win and go ahead.
e.g. flags both true, turn=1, turn=0 lasts, P0 runs into critical,
P1 waits.
Eventually P0 finishes critical, flag0=false,
P1 now runs critical, even though turn is still 0.
Doesn't matter what turn is, each can run critical
so long as other flag is false.
Can run at different speeds.
If other flag is true, then other one is either in critical
(in which case it will exit, you wait until then)
or at start of critical
(in which case, you both resolve conflict with turn).
Atomic instructions provided by OS to make it easy to write entry and exit sections.
wait(S):
signal(S):while S <= 0 do no-op S--
Wait if S negative or 0.S++
Each process is simply:
repeat
wait(mutex)
critical
signal(mutex)
remainder
At start mutex=1,Who gets to go next is pretty much random (perhaps unfair). It might be nice to have a FIFO queue.
Question - Why is who goes next pretty much random?
Busy waiting - Keeps getting scheduled by CPU. May run for days, doing nothing except interfering with running of other programs.
To avoid busy waiting, wait() system call sends process voluntarily out of Ready queue and into Wait state. signal() sends wakeup to a process on the Wait list, restores it to the Ready queue.
wait(S):
S--
if S < 0
suspend this process
S++
if S <= 0
wakeup 1 process at head of queue
S = - (no. of processes waiting).
In signal(), someone just finished critical,
so if S < 0, wake one up.
But we did S++ already, so if S <= 0, wake one up.
In wait(), if S < 0, we have to wait along with others,
if S=0, we are first to wait,
i.e. if S <= 0 we wait,
but we did the S-- already, so if S < 0 we wait.
Consider multiple processes:
start S=1, 1st process, S=0, carries on into its critical, 2nd process, S=-1, wait, next process, S=-2, wait, ... S=-(n-1), finally, 1st process finishes critical, signal(), wakes up a single process, sets S=-(n-2), and goes into its remainder
Processes end up waiting for each other. e.g. If more than 1 semaphore:
Process P0:
Process P1:wait(S) wait(Q) ... signal(S) signal(Q)
In general, a deadlock involves process holding a resource, will only release it if it gets another resource, which is being held by other process, etc.wait(Q) wait(S) ... signal(Q) signal(S)
More precisely, deadlock arises if there is:
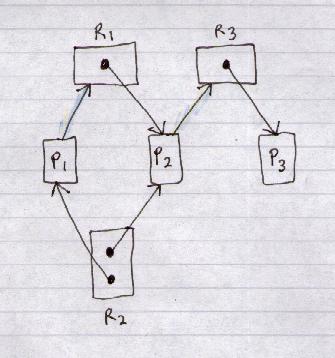
Lines from resource R to process P -
an instance of R is allocated to P.
Lines from P to R
- P is waiting for an instance of R.

Let D = Deadlock, C = cycle:
D implies C
C does not imply D
(No C) implies (No D)
(No D) does not imply (No C)
Deadlock is proper subset of cycles.
If C plus only one instance of each resource, then D.
UNIX ignores deadlocks.
Deadlock Avoidance - OS queries what is going on and decides dynamically if next request will cause deadlock (or danger of deadlock).
Remember - Processes are 1-way. You can't "rewind" processes. You must let them run forward to finish.
Can't interrupt at the point marked and say "Please close file1 because other program, which is holding file2, needs file1 to finish". Can't do this because file1 would be closed in an incomplete state, perhaps with inconsistent or partial data. Would be better if file1 had never been opened.open(file1) do lots of calculations write some to file1 ----- open(file2) do more calculations write to file2 write more to file1 close(file2) close(file1)
Can't return file1 to original state, reset instruction counter to before "open(file1)", and continue, because global variables may have changed since then, and we have no memory of what they used to be.
Can't terminate process and close file1 because it is in inconsistent state. Get correctness problems unless we allow process to finish naturally.
Can only freeze and wait for file2 to become free.
An Exception to the above - We may explicitly design processes so they keep regular checkpoints to which they can be rolled back if necessary (i.e. they periodically save their entire state), e.g. Many processes accessing a database. We design the co-operating processes, so we can design them to be rolled back if necessary.
Even these, though, can be rolled back only to certain pre-defined points, not to any arbitrary point.
By the way, it seems to me that in general rolling back to any arbitrary point is impossible. The program would need to save its entire state after every instruction - but the process of saving the state is itself a program that would need to be rolled back, and so on.
Safe state - there exists a possible order in which they can finish without any processes backing out (releasing resources). We will enforce this finishing order if necessary to avoid deadlock. We may not have to enforce it - the processes may be releasing resources soon anyway.
Unsafe - there is no possible finishing order unless one of the processes backs down themselves (releases resources). We could still avoid deadlock, but now we have to depend on the processes themselves.
Deadlock Avoidance algorithm - Simply never let it go into an unsafe state.
Process needs memory at different times in its execution. It acquires and releases memory at different points:
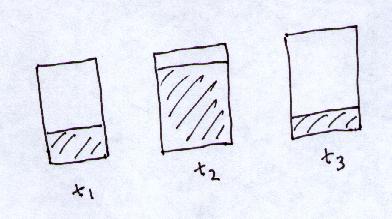
Given 2 processes, can they both finish? Remember a process can't back out. They can only freeze and wait for other to finish. We may have to freeze one (deny its requests for more memory, even though more memory is available) to make sure that at least one can finish:

to avoid this:

To do this, we need to know maximum amount of memory the process will need over entire course of execution.
This may be impossible with memory, but may be possible with other shared resources.
Exercise - Consider a system consisting of 4 resources of the same type that are shared by 3 processes, each of which needs at most 2 resources. Show that the system is deadlock-free.
Answer - We can't have a state where all 4 resources held and 1 process can't finish. If all 4 held, one must have 2. So it can finish. And if 1 finishes all can finish.
Exercise - What if we don't know the maximum amount of resources the process will need before terminating?
Then any resource allocation may be unsafe. Consider 2 processes that will each want all the resources before termination. Then assigning even 1 resource each gets us into an unsafe state.
Define matrix to show what is allocated where,
max that each process will need,
and hence the extra resources it will need that it does not have now.
e.g. There are 10 instances of resource type A,
5 of B, 7 of C:
Allocated Max Need
A B C A B C A B C
P0 0 1 0 7 5 3 7 4 3
P1 2 0 0 3 2 2 1 2 2
P2 3 0 2 9 0 2 6 0 0
P3 2 1 1 2 2 2 0 1 1
P4 0 0 2 4 3 3 4 3 1
and currently free:
Show that there exists a finishing order P1,P3,P4,P2,P0 (and another one P3,P1,..).Free A B C 3 3 2
P1 increases its allocation to:
Allocated Max Need
A B C A B C A B C
P0 0 1 0 7 5 3 7 4 3
P1 3 0 2 3 2 2 0 2 0
P2 3 0 2 9 0 2 6 0 0
P3 2 1 1 2 2 2 0 1 1
P4 0 0 2 4 3 3 4 3 1
and hence the free list:
This is still a safe state. - Why?Free A B C 2 3 0
Now, can request for (0,2,0) by P0 be granted?
"Stranger" process: